如何快速开始惯性导航仿真
从Apple iWatch到SpaceX Falcon9,许多运动设备中都具备惯性测量单元(Inertial Measurement Unit, IMU)进行位置和运动测量。尽管Apple iWatch和SpaceX Falcon9使用的IMU精度悬殊,用于处理IMU数据的算法也极为不同,但它们背后的物理和数学模型是相同的。
如何理解IMU不同精度参数对应用的影响呢?现在可以通过Aceinna提供的在线工具快速进行IMU算法仿真,来直观的理解各个参数的影响。这一在线工具包括了开源的仿真框架GNSS-INS-SIM和基于Web的GUI。
开始
IMU包含三轴加速度和三轴陀螺仪,也可以选配三轴地磁传感器。通常与GNSS接收机进行融合完成组合导航方案。IMU通常应用于运动测量、平台稳定、姿态测量以及GPS失锁期间的位置跟踪。
在使用在线版本的仿真系统之前,需要在ACEINNA Developer Website完成注册并登陆,然后可以参考快速应用手册中的示例来学习如何使用。
创建IMU模型
IMU模型描述了IMU的噪声和漂移等误差特性。这些特性通常在IMU产品制造商的用户手册中提供,包括零偏稳定性和随机游走等等。仿真系统内置了高精度、中等精度和低精度的IMU模型,可供选择使用。创建完成IMU误差模型后,需要对其命名以供后续使用。
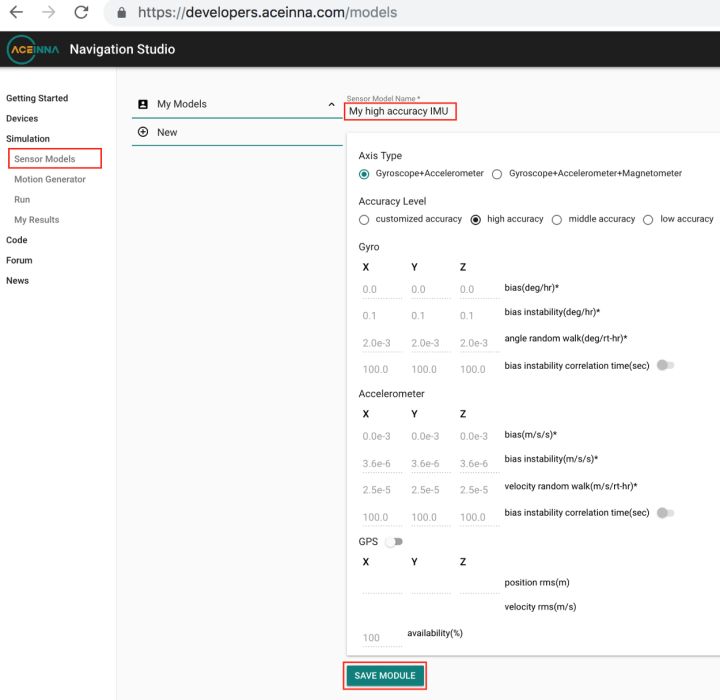
Figure 1 ACEINNA Navigation Studio can be used to create an IMU Sensor Model in seconds
生成运动轨迹
运行算法前,需要生成运动轨迹。轨迹描述了物体随时间的运动,其用于生成对应的参考加速度和角速度。结合上述的传感器误差模型,仿真系统将会进一步生成带误差的IMU测量数据,而测量数据则可用作算法的输入。
最简单的运动轨迹为:保持静止。静止时的传感器测量可以用于进行Allan方差分析。下图给出了左转测试,它用于仿真无LIDAR、摄像机及GNSS辅助情况下自动驾驶汽车利用惯性导航完成定位的误差特性。
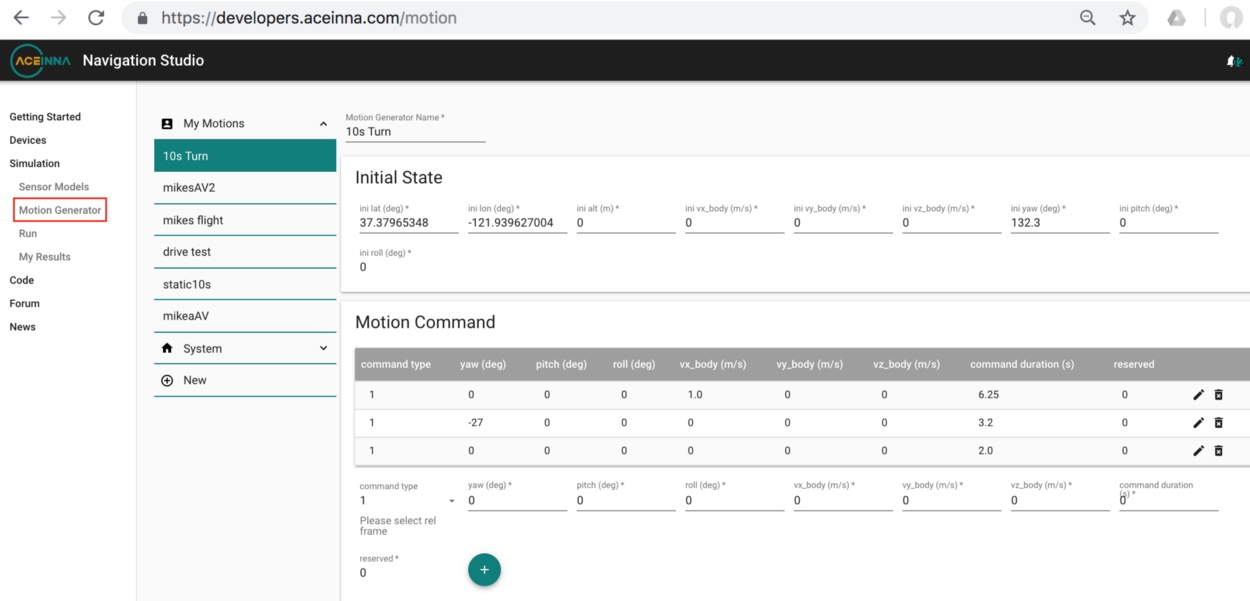
Figure 2 Motion Generator for Left Hand Turn
选择算法并仿真
具有运动轨迹和传感器模型后,我们需要选择一个算法来进行仿真。现在,基于Web的在线版本的GNSS-INS-SIM提供了多个预置的算法,包括Aceinna IMU产品中所使用的算法。Aceinna将提供工具,支持将ACEINNA’s OpenIMU embedded inertial development tools创建的用户自定义算法上传。
这里,我们选择了“Free Integration”算法,该算法演示了IMU产品的导航性能。在一次仿真中可以将算法运行多次,从而对误差进行统计。
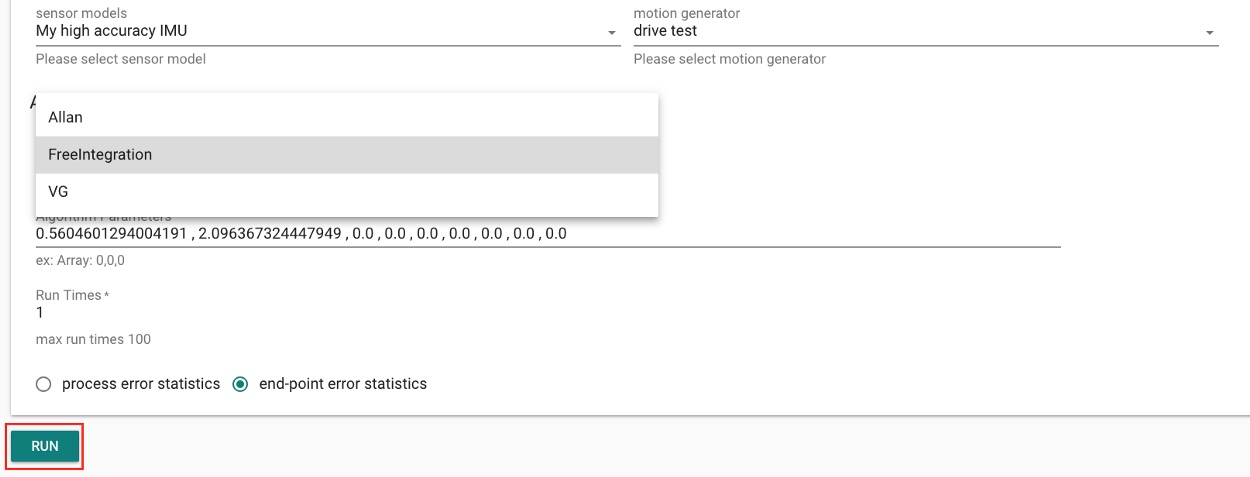
Figure 3 Select an Algorithm to Run Simulation
结果显示
仿真完成后,将会收到提示。在线版本的GNSS-INS-SIM提供了多种仿真数据分析,包括:
- 误差的统计结果;
- Allan方差画图;
- 数据的时间变化图/误差图
- 地图显示(用于位置显示)
下面是将本次仿真结果显示在地图上的结果。
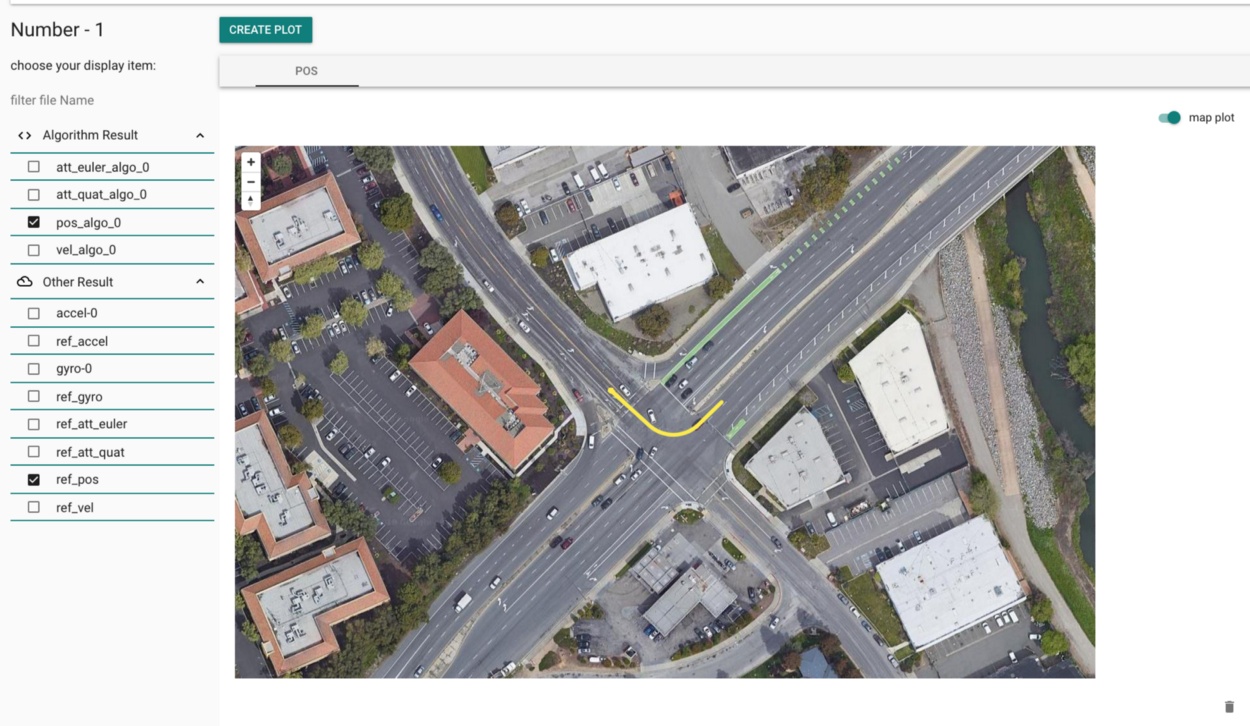
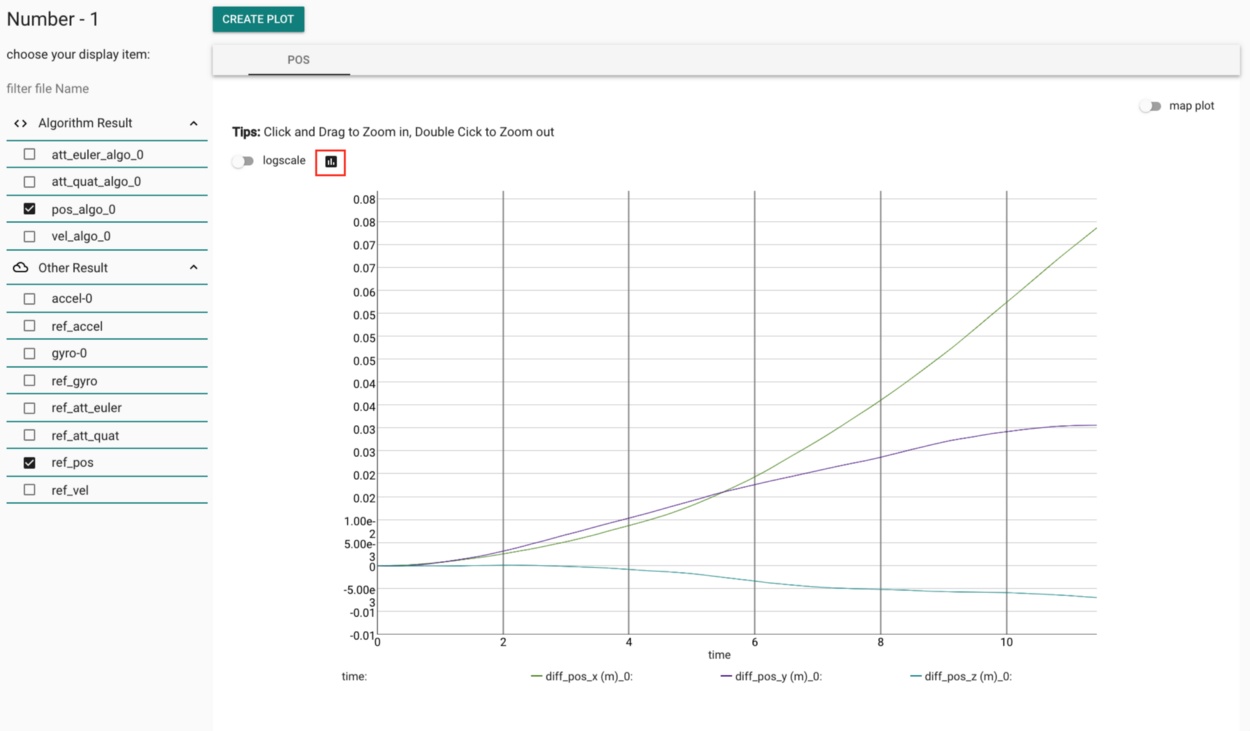
Figure 5 Drift in X,Y,Z Position vs Time
关于新纳传感系统有限公司
新纳传感系统有限公司是全球领先的MEMS传感解决方案提供商,产品线包括基于磁阻薄膜的高频率高带宽电流传感器、高性能代码开源惯性测量单元(IMU)、高精度实时动态(RTK)导航系统和厘米级精度定位服务。公司在中国无锡设有研发与生产基地,并在波士顿、芝加哥和硅谷设有全球研发中心。请访问新纳官网www.aceinna.cn了解更多信息。
ACEINNA, INC.
Add.: 3 Highwood Drive, Suite 101W, Tewksbury, MA 01876
Tel.: 978-965-3200
新纳传感系统有限公司
地址: 无锡市新吴区菱湖大道111号 无锡软件园天鹅座C栋25楼
电话: 0510-88088001
