2020,自动驾驶为何没有如期而至?
行业趋于务实,道出自动驾驶需要高精度IMU的7个理由
自动驾驶是百年汽车工业史上又一次伟大的经典转移,将重新定义汽车产业的游戏规则。与前几年大多数企业在L4、L5级自动驾驶概念车争奇斗艳相比,从2019年开始,整个行业逐步露出务实的气息,多数企业都在强调L2级ADAS(高级辅助驾驶)低成本、可量产解决方案。而聚焦自动驾驶落地的同时,行业“领头羊”的眼光却已远超汽车本身,开始思考人与车、社会乃至自然的融合。
自动驾驶汽车需要融合多种不同的技术,例如,激光雷达可以创建周围环境的精确3D图像;雷达可以使用不同的电磁波谱对目标进行测距;摄像头用于识别路标,检测颜色;高分辨率地图可以用于定位,识别和控制等。与IMU不同,这些技术都需要外部环境来向软件堆栈提供数据,以进行定位、感知和控制。这意味着它们都可能因受外部环境的影响而出现性能下降,因此,IMU以其独特的“独立性”成为了安全驾驶和传感器融合的核心技术。
低成本、可量产是自动驾驶行业当前的诉求,ADAS将成为下一阶段智能驾驶新焦点,本文将列出7个重要因素,探讨高精度IMU在ADAS(高级辅助驾驶)中的优势以及对推动行业发展的作用。读者可以在新纳官网(www.aceinna.cn)留言并讨论在自动驾驶中应用高精度IMU的其他原因和优势。
01 安全第一
人、车、社会、自然间的融合是未来趋势,系统工程师需要考虑每一种可能的应用场景并始终配有备份方案。失效模式效应分析(FMEA)将此需求形式化为降低风险的设计需求。对于自动驾驶,FMEA需要分析这样一个问题:如何处理激光雷达、雷达和摄像机同时失灵的情况?答案是IMU可以快速进行航位推算,在短时间内独立保证一定的位置和姿态确定精度。上述故障情况下,依靠IMU可以控制车辆减速并使其停止,在紧急情况下提供最佳解决方案。尽管这看起来像是一个凭空想象的需求,但对成熟的自动驾驶汽车安全策略来讲,这实际上是基本要求。
一个高精度的IMU可以精准确定和跟踪姿态。我们通常会考虑汽车的位置,但常常忽视了行驶方向,稍微偏离正确方向在很短时间即有可能导致驶入错误的车道。车辆的动态控制要求传感器具有动态响应,高精度IMU能够很好的跟踪车体姿态和位置变化。得益于IMU的“独立性”特质,IMU甚至可以在轮胎打滑或失去牵引力时保持跟踪。此外,精确的姿态测量也可以作为其他算法的有用输入。激光雷达和照相机在确定姿态方面确有用处,但是GPS对此用处不大,所以一个稳定的独立姿态参考在校正和对准中大有裨益。
03 精确的车道保持
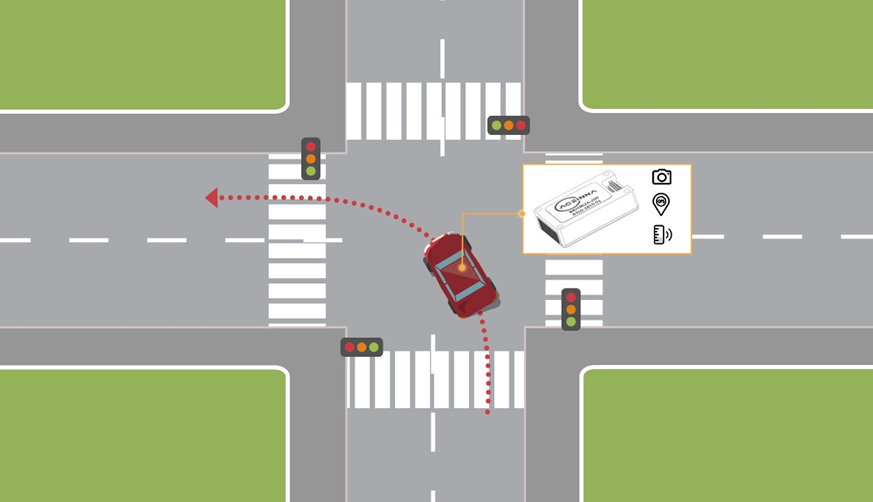
正常情况下,驾驶者可以将车道位置的偏差保持在10厘米左右,实际上这已经是很高的精度了,但良好的自动驾驶更需要稳定可靠的车道保持。车辆转弯时,发生车道偏移很容易导致事故发生。IMU作为动态驾驶车辆的关键动态传感器,当其他传感器离线时,可在短时间内(最多10秒)保持高于30cm的位置测量精度。IMU也可以交叉比较多种定位算法的结果,并给出最终定位结果的确定性。转弯时,精确的IMU在车道保持中起着关键作用。
04 低成本、可量产
特斯拉以其“无需激光雷达”的自动驾驶技术而闻名遐迩。如果没有激光雷达,一个好的IMU就更为重要。受摄像机场景或外部照明条件影响,基于摄像机的车辆定位会有更频繁的低精度周期。基于摄像机的定位在捕获的图像中使用“SIFT”特征跟踪来计算姿态。如果不是立体声相机,IMU本身的惯性数据也是计算位置和姿态的数学核心部分。
高精度激光雷达和高清地图的强大结合是目前最先进的L4级自动驾驶技术的核心,例如Cruise和Waymo正在测试的自动驾驶技术。在这些系统中,激光雷达扫描使用卷积信号处理技术与高清地图实时匹配。在匹配的基础上,估计车辆的精确位置和姿态,这个过程的计算量很大。虽然我们都倾向于认为计算成本是微不足道的,但这一点对车辆并不成立。算法对初始位置和姿态的了解越准确,计算最佳匹配所需的计算量就越少。此外,通过使用IMU数据,算法错误的收敛到高分辨率地图的局部最优解的风险也会被降低。
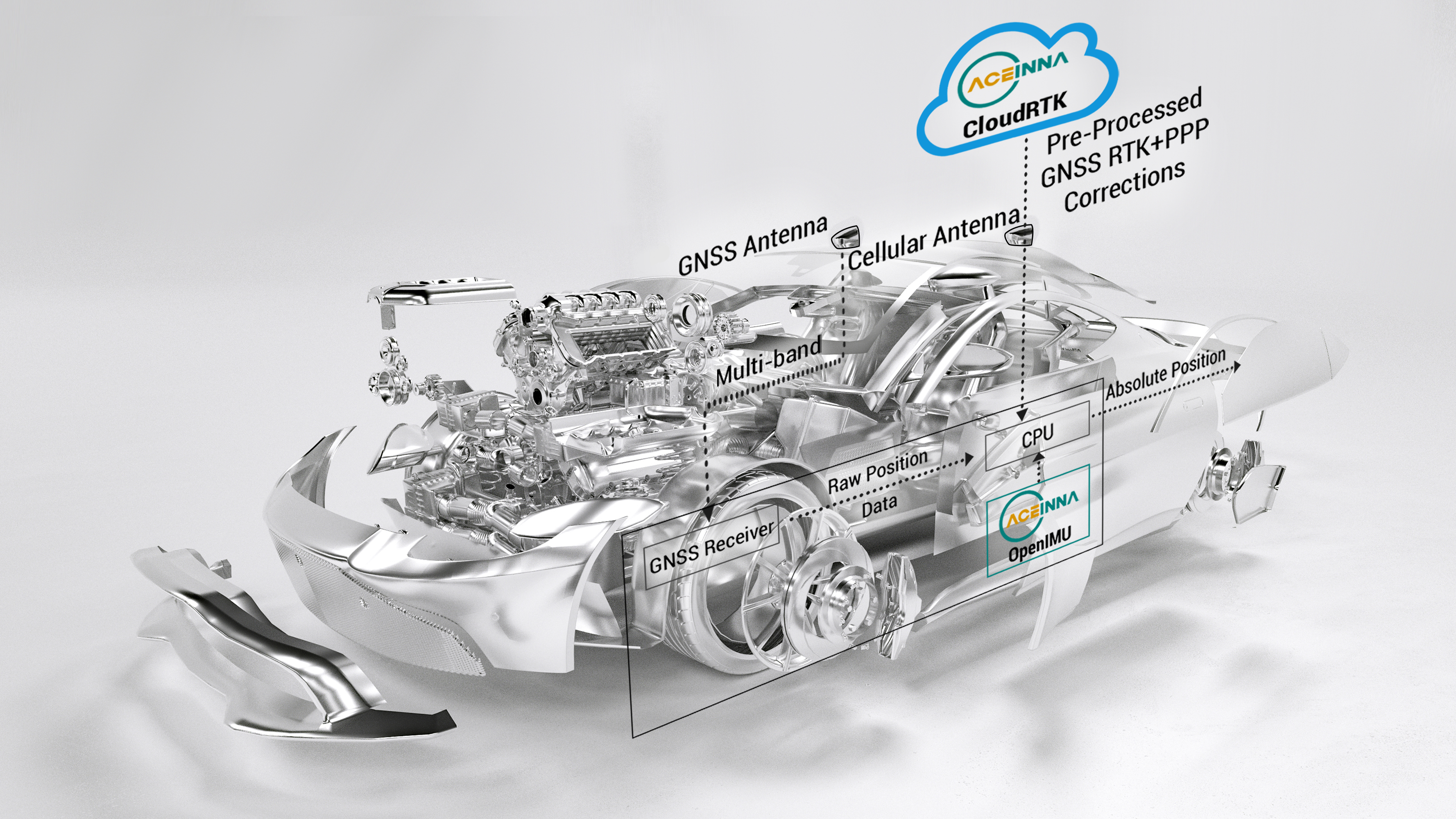
06 GPS/INS:实现高精度GPS工作
在当下的生产车辆中,GPS系统通常使用低成本的单频接收器。这使得GPS精度在车辆自动化中几乎没有作用。现在,多家半导体公司正在研发并推出低成本的多频GNSS接收机。除此之外,基于网络的校正解决方案(如RTK和PPP)可以在理想条件下提供最高厘米级精度的GPS定位。然而,这些解决方案对诸如桥梁、树木和建筑物遮挡等环境非常敏感。为了克服这一挑战,提高GPS的精度和可靠性,采用高精度IMU辅助定位是一种行之有效的方法。这种GPS/INS技术包括紧密耦合和超紧密耦合GPS/INS。
07 汽车需要一个完整的IMU
事实证明,目前的量产汽车上已经安装有部分或完整的IMU了。例如:车辆稳定性系统很大程度上依赖于Z轴陀螺仪和横向X-Y向加速度计,翻滚检测依赖于敏感轴沿车身前进方向的陀螺仪。在过去的十多年中,这些传感器已经成为车辆安全系统的一部分。唯一存在的问题是这些传感器精度太低,无法应用于前六个案例。那么,为什么不升级为高精度的可用于自动驾驶的IMU呢?其主要障碍依旧是成本问题。
汽车制造商试图以多种方式来解决这些问题。L2+级ADAS将成为下一阶段智能驾驶的新焦点,量产指日可待。L4级将在商用车、城市出行领域探索落地。低成本、可量产是自动驾驶行业当前的诉求,人、车、社会、自然间的融合是未来趋势。新纳传感和业内其他公司正致力于尽快消除成本壁垒,让自动驾驶如期而至。
关于新纳传感系统有限公司
新纳传感系统有限公司是全球领先的MEMS传感解决方案提供商,产品线包括基于磁阻薄膜的高频率高带宽电流传感器、高性能代码开源惯性测量单元(IMU)、高精度实时动态(RTK)导航系统和厘米级精度定位服务。公司在中国无锡设有研发与生产基地,并在波士顿、芝加哥和硅谷设有全球研发中心。请访问新纳官网www.aceinna.cn了解更多信息。
ACEINNA, INC.
Add.: 3 Highwood Drive, Suite 101W, Tewksbury, MA 01876
Tel.: 978-965-3200
新纳传感系统有限公司
地址: 无锡市新吴区菱湖大道111号 无锡软件园天鹅座C栋25楼
电话: 0510-88088001
